服務熱線
86-0769-83110798

“風速調到15m/s,模擬沿海配送場景的陣風,注意監測無人機姿態角波動!"
在某無人機實驗室里,年輕助手小林正盯著屏幕上跳動的數據,指尖在控制界面上快速點擊。實驗室中yang,一面由數十個微型風機組成的陣列正高速運轉,氣流穿過整流格柵形成均勻的風場,而處于風場中心的多旋翼無人機,卻穩穩懸停在空中,仿佛被一層無形的屏障護住——這就是低空經濟發展的關鍵支撐技術之一:無人機風墻。
很多人誤以為“風墻"是實體墻體,小林第1次接觸時也犯過同樣的錯。“周哥,這風墻不是擋 wind 的墻啊?怎么看起來就是一堆風機?"他一邊調整風機陣列的轉速,一邊問道。
老周指著風墻陣列解釋:“這是‘虛擬風障’,核心是‘以風制風’。你看這組 3×6 的風機矩陣,每個風機都是獨立控制的無刷電機,能通過轉速差異生成不同類型的風場。咱們做低空物流配送測試時,山區的亂流、沿海的陣風都能靠它模擬出來,同時無人機自身的風墻系統會實時產生反向氣流抵消干擾。"說話間,屏幕上彈出一組數據:風速15m/s(7級風)、姿態角波動≤12°、懸停偏移≤30cm。
無人機風墻的核心價值,在于破解低空環境的風場難題。隨著低空經濟升溫,無人機已廣泛應用于物流配送、電力巡檢、應急救援等場景,但6級以上大風就能讓普通無人機航線偏移、載荷不穩,甚至失控墜落。而風墻系統通過“感知-計算-調控"的全鏈條響應,把無人機的抗風極限提升到了新高度。
“你看這三個核心模塊的參數,才是風墻的硬實力。"老周拉著小林湊近傳感器陣列,“首先是環境感知模塊,這里的超聲波風速儀精度能到±0.1m/s,采樣頻率100Hz,相當于每秒能捕捉100次風場變化;再加上六軸IMU慣性測量單元,能實時獲取無人機的俯仰角、橫滾角數據,時間同步誤差不超過1ms。沒有這么精準的感知,后續調控就是瞎忙活。"
小林指著控制系統的屏幕追問:“那調控指令是怎么算出來的?我看數據刷新得特別快。"
“這就是智能控制模塊的功勞,相當于風墻的‘大腦’。"老周調出算法界面,“內置的自適應抗風算法能快速分析風場類型——是持續風、陣風還是湍流,然后制定調控策略。比如遇到突發陣風時,響應延遲要控制在0.5s以內,不然無人機反應不過來。你看現在模擬的8級陣風,持續時間5s、間隔10s循環,系統已經自動調整了風機陣列的輸出功率,無人機的電機轉速也跟著適配,姿態波動一直穩定在安全范圍。"
作為執行終端的氣流執行模塊,同樣藏著參數。實驗室里的風墻采用陣列式微型噴口設計,單個噴口的氣流精度能控制在±5%以內,通過不同區域噴口的協同工作,既能模擬復雜風場用于測試,也能作為無人機搭載的風墻裝置輸出反向氣流。“更關鍵的是輕量化,"老周補充道,“無人機搭載的風墻裝置重量要控制在500g以內,不然會增加負載影響續航,這對材料和結構設計要求很高。"
說話間,小林突然發現屏幕上的湍流強度數據異常:“周哥,湍流強度超過30%了,無人機橫滾角有點飄!"
老周迅速切換到手動調控模式:“把湍流發生器的格柵角度調小5°,同時提升無人機風墻的響應優先級。你記住,不同應用場景對參數的要求不一樣——物流配送要重點保證懸停穩定性,參數偏向姿態波動≤15°;電力巡檢需要精準航線,位置偏移就得控制在50cm以內;應急救援更ji端,可能要應對10級大風(25m/s),這時候就得犧牲部分續航,優先保證抗風能力。"
調整完成后,屏幕數據重新穩定。小林看著風場中平穩飛行的無人機,終于明白風墻技術對低空經濟的意義:“原來這‘隱形屏障’不僅能讓無人機在惡劣風場里作業,還能拓展低空作業的邊界。"
老周點點頭,指向窗外遠處的低空物流配送點:“現在GB 42590-2023標準已經明確要求,民用無人機必須通過抗風性能試驗才能上市。未來隨著技術迭代,風墻系統會更智能——不僅能實時調控,還能預判風場變化;體積也會更小,逐步和無人機機身融合。到時候,不管是山區的物資配送,還是高空的電力巡檢,都能更安全、更高效,低空經濟的發展才能真正沒有‘風阻’。"
實驗室里的風機漸漸放緩轉速,無人機平穩降落。那些跳動的技術參數,看似冰冷,卻正在為低空經濟的蓬勃發展,筑起一道道可靠的“隱形防風盾"。
關于我們
由Delta德爾塔儀器聯合電子科技大學(深圳)高等研究院——深思實驗室團隊、工信電子五所賽寶低空通航實驗室研發制造的無人機抗風試驗風墻\可移動風場模擬裝置\風墻裝置,正成為解決無人機行業抗風性能測試難題的突破性技術。
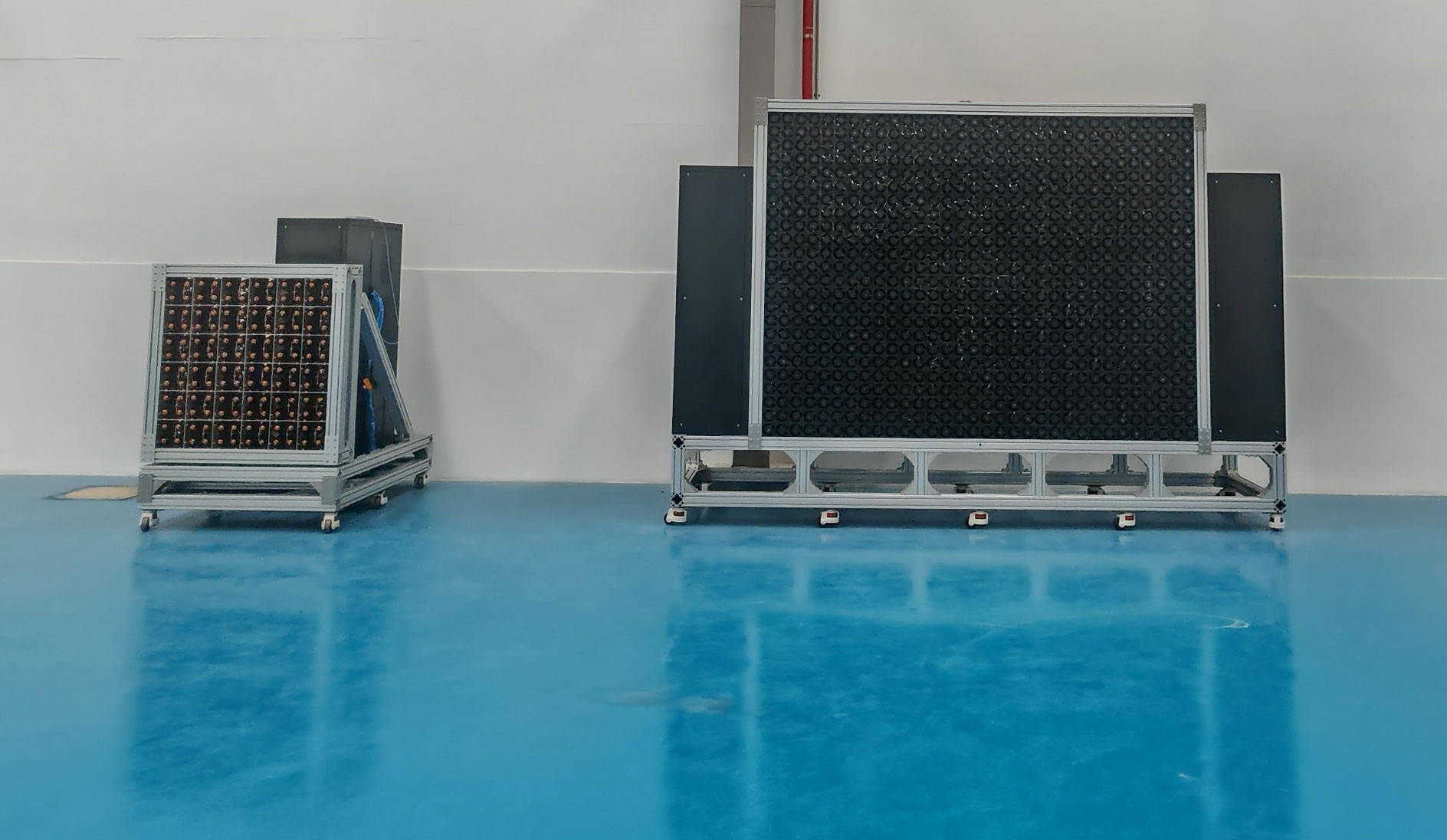

低空復雜環境模擬裝置\無人機風墻測試系統\無人機抗風試驗風墻\可移動風場模擬裝置\風墻裝置
聯系方式
郵件:gaoshengkeji@163.com